Podstawowe informacje o tym, jak działa transformator wyjaśniliśmy w poprzednim artykule. Warto jednak rozwinąć kilka kolejnych pojęć i zależności, aby jeszcze lepiej zrozumieć funkcjonalności, sposoby działania i budowę tego typu urządzeń.
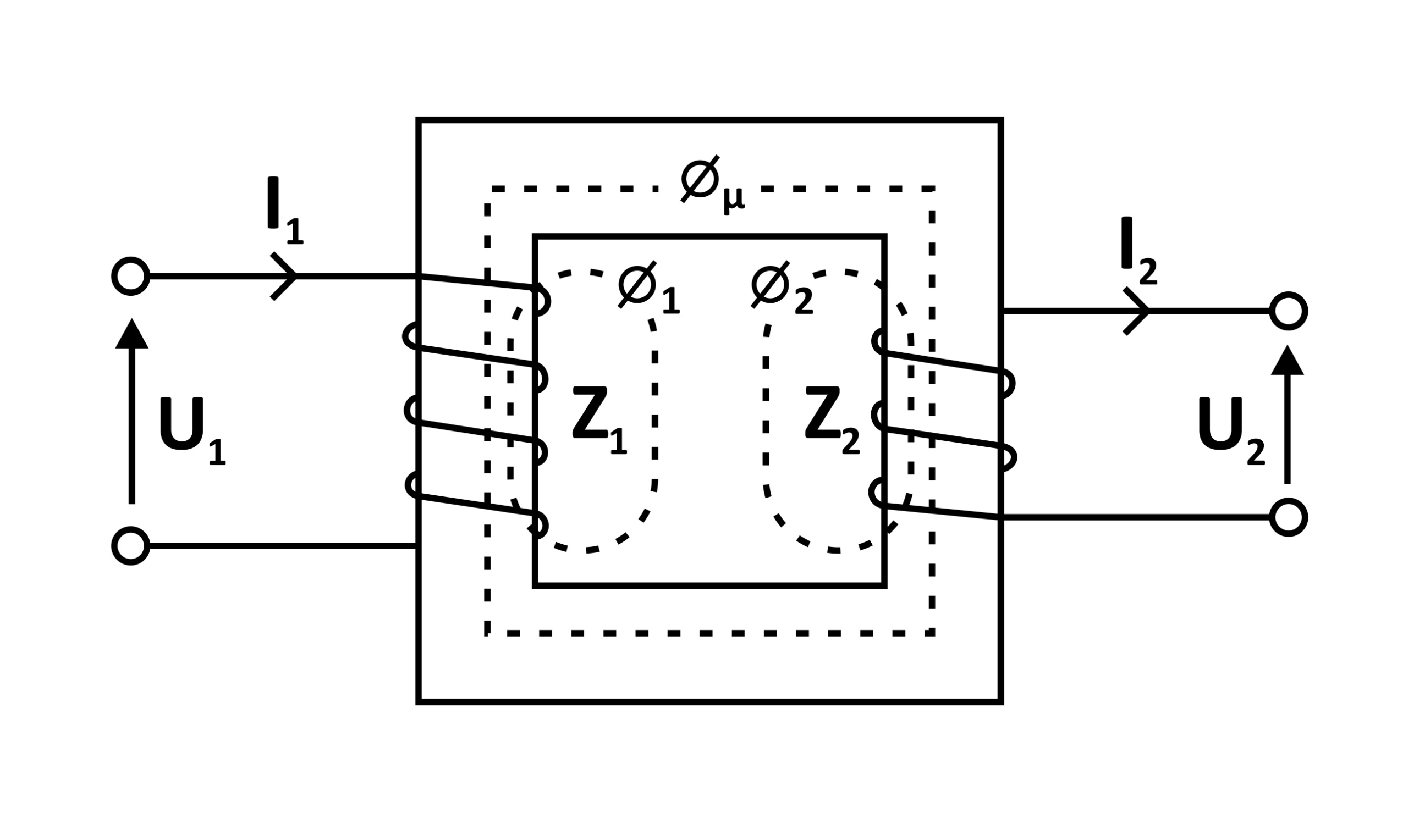
Jak wiemy, transformator składa się z rdzenia, na którym nawinięte są uzwojenia pierwotne i wtórne.
 Do zacisków uzwojenia pierwotnego przyłożone jest napięcie przemienne U1, które wywołuje przepływ prądu w cewce uzwojenia pierwotnego o wartości I1.
Do zacisków uzwojenia pierwotnego przyłożone jest napięcie przemienne U1, które wywołuje przepływ prądu w cewce uzwojenia pierwotnego o wartości I1.
Przemienny prąd elektryczny I1 wywołuje zmienne pole magnetyczne, którego linie sił zamykają się w rdzeniu ferromagnetycznym. Rdzeń ten jest dla pola magnetycznego znacznie lepszą drogą (czyli ma większą przenikalność magnetyczną) niż otaczające cewkę powietrze. Mówimy tutaj, że w rdzeniu przepływa strumień przemiennego pola magnetycznego.
Ten sam strumień przenika przez wnętrze cewki uzwojenia wtórnego indukując w nim siłę elektromotoryczną, która objawia się pojawieniem się przemiennego napięcia na zaciskach uzwojenia wtórnego (zjawisko indukcji elektromagnetycznej).
Ten sam strumień przenika również cewkę uzwojenia pierwotnego wywołując w niej siłę elektromotoryczną skierowaną przeciwnie do napięcia zasilającego (Reguła Lenza).
Strumień przemiennego pola magnetycznego jest wspólny dla obu uzwojeń, a indukowana siła elektromotoryczna jest taka sama dla każdego pojedynczego zwoju (Prawo przepływu), dlatego napięcie, jakie pojawi się na zaciskach strony wtórnej, zależy głównie od stosunku ilości zwojów w cewce uzwojenia pierwotnego i cewce uzwojenia wtórnego. W prosty sposób, przez różną liczbę zwojów obu uzwojeń otrzymujemy zmianę napięcia – czyli transformację.
Rys. 1
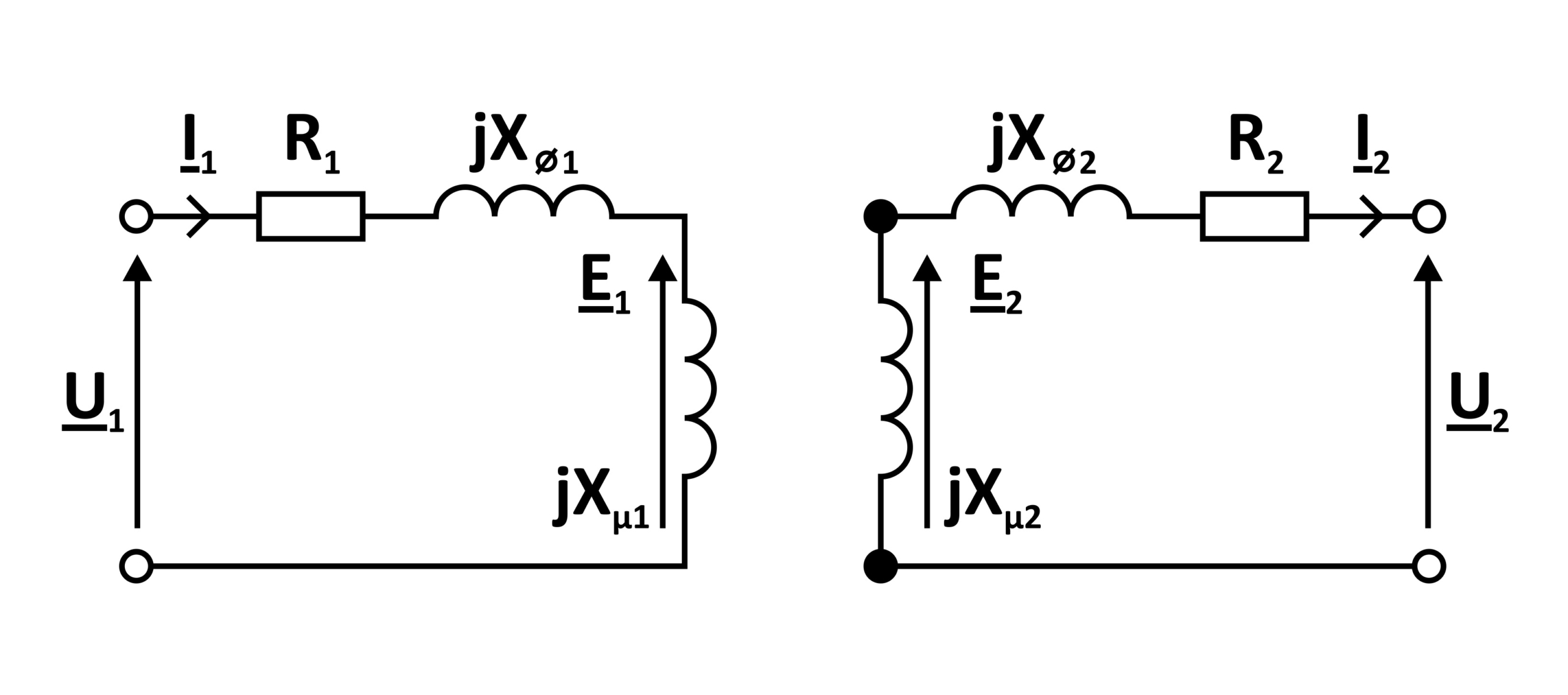
R1 i R2 – rezystancje uzwojeń
XΦ1 i XΦ2 – reaktancje rozproszenia strony pierwotnej i wtórnej odzwierciedlające te części strumienia magnetycznego, które zamykają się w przestrzeni nie obejmującej cewki drugiej (zamykające się głównie przez powietrze)
E1 i E2 – siły elektromotoryczne indukowane
Na podstawie podanych oznaczeń wprowadza się następujące podstawowe pojęcia:
n = Z1 / Z2 – przekładnia zwojowa
Jeżeli strumień magnesujący jest wspólny dla obu uzwojeń, to wiadomo, że będzie on w każdym zwoju indukował taką samą siłę elektromotoryczną. Stąd tą samą przekładnię można określić jako stosunek sił elektromotorycznych
n = E1 / E2
Stosując podany wzór na przekładnię, możemy sprowadzić wartości elementów strony wtórnej z rys 2 na stronę pierwotną. Wówczas:
U’2 = nU2 ; I’2 = I2/n ; R’2 = n2R2 ; X’Φ2 = n2 XΦ2
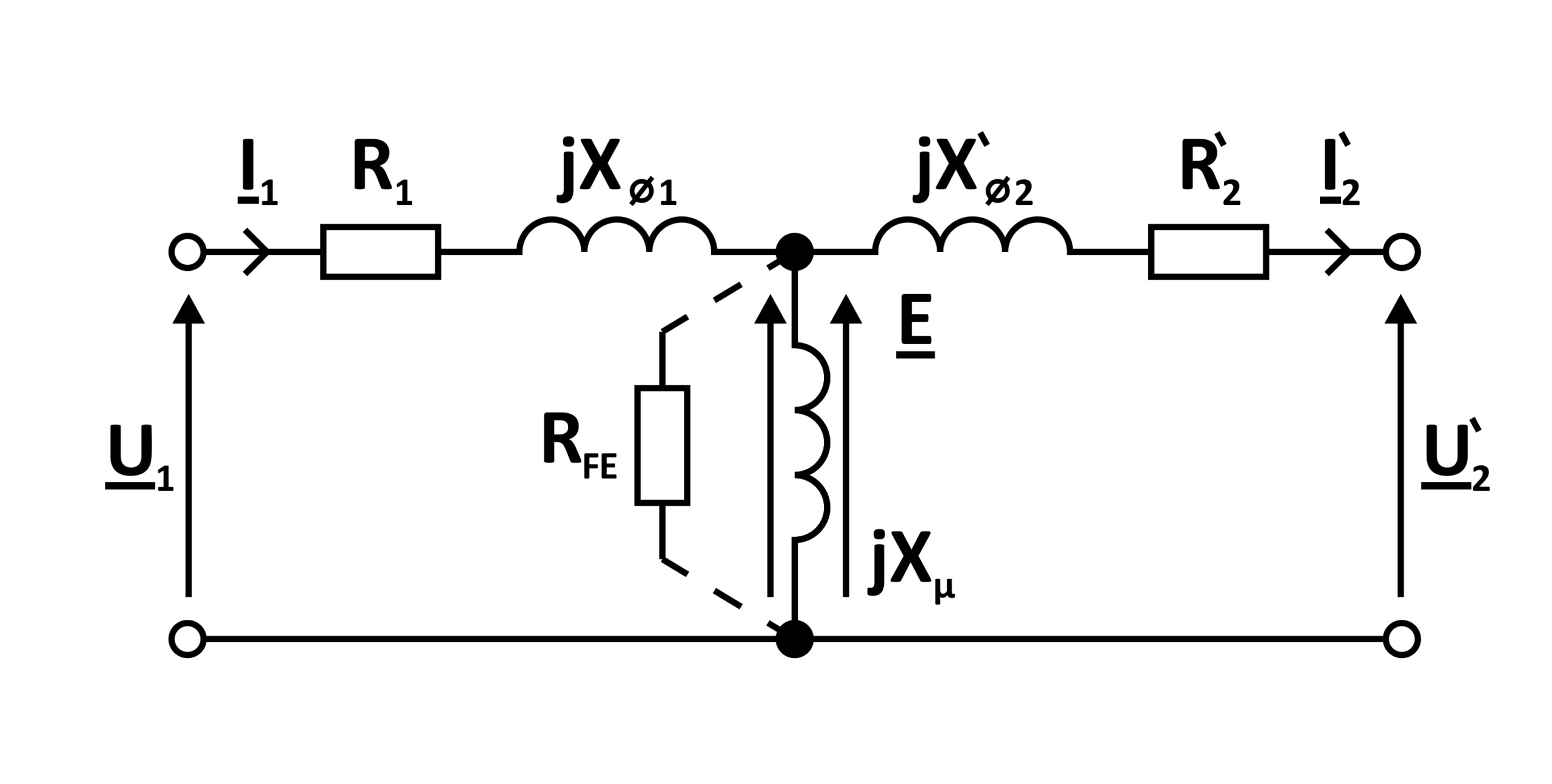
Dzięki czemu powstaje powszechnie stosowany schemat zastępczy transformatora.
Rys. 3: